




GUIDE WAVE RADAR LEVEL TRANSMITTER
Working principle
Guided Wave Radar Level Transmitter works on the principle of time and travel (TDR).
Radar wave travels at the velocity of light. The flying time is converted into level signal via the electronic components. The probe emits high frequency wave pulse which travels along a cable probe or a rod probe. When the wave pulse reaches the medium surface, it will be reflected and received by the receiver, and then the distance signal will be converted into level signals.
Input
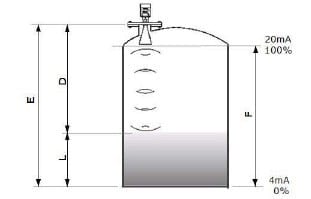
The reflected wave pulse travels back along the cable and arrives at the electronic unit. The microprocessor will process the signals and recognize the returned waves from medium surface. The identification of correct return wave signals can be done by the intelligent software. The distance D from the medium surface is proportional to the travel time: D=C X T/2 (C is velocity of light) Due to the empty tank distance D is known, and then the level L is: L=E-D
Output
By setting the empty tank height E as zero point, the full tank height F as full range point and other practical parameters, which will make the transmitter adapt to the measuring environment automatically, corresponding to output 4-20mA.
Measuring range
F—-measuring range
E—-distance of empty tank
B—-Dead zone on the top
K—-min. distance between probe and tank wall
Dead zone at top refers to the min. distance between highest medium position and the measuring reference position (point). Dead zone at bottom refers to the distance which cannot be measured accurately nearby the bottom of the cable. The distance between the dead zone at top and the dead zone at bottom is the effective measuring distance. Note: Level measurement in a tank can be effectively performed only when the medium level within the top dead zone and the bottom dead.



